隧道展訊 在地下工程的勘探、建設和維護中,機器人的應用已經成為了新的發展趨勢。在智利的丘基卡馬塔地下礦場項目中,施工團隊成功應用了Spot機器狗,不僅提升了現場安全性還增加了工作效率;該項目還獲得了2022年國際隧協大獎中的“年度裝備與設備創新獎”,本期就讓小編帶大家一起看看吧!
在地下工程中應用機器人已經成為了業界最新的發展趨勢,機器人可以有效減少人員風險,提升工作效率和生產力;然而,機器人技術受工作環境影響很大,需要根據工作環境選擇適合的機器人類型。
丘基卡馬塔地下采礦場項目中使用的Spot機器狗
■ 輪式機器人:
適合在平坦地形中應用,且載重量大,但地下工程的施工環境比較復雜,輪式機器人的活動能力嚴重受限。
輪式機器人嚴重受地形限制
飛行機器人或者無人機,可以完全不受地形影響,但飛行機器人載重過小,續航能力差,并且在地下空間中造成嚴重的噪聲問題。
在地下工程中應用飛行機器人
■ 仿生學機器人:
四足和六足仿生學機器人可提供很強的越障能力,在側翻或者摔倒后,可以自己重新站立恢復行動能力,還可以上下為人類準備的樓梯,無需專用通道;但仿生學機器人也存在載重和速度不足的問題。
在復雜環境中的應用
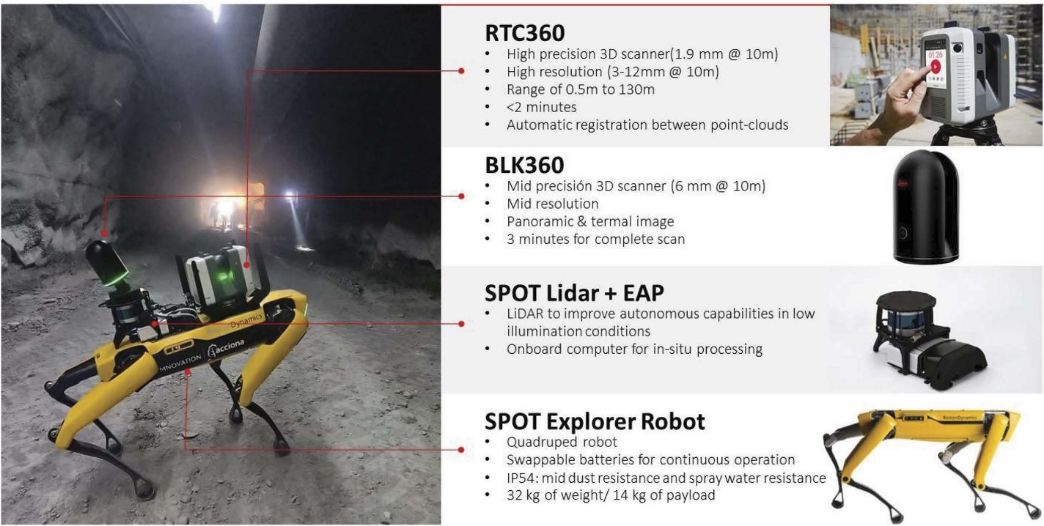
在智利的丘基卡馬塔地下采礦場建設中,施工方認為仿生學機器人是最適合該工程的機器人類型,在諸多的仿生學機器人中,施工團隊選擇了來自波士頓動力的Spot機器狗。
仿生學機器人也有多種選擇
Spot機器狗的優勢在于其系統兼容性強大,續航能力優秀,具備摔倒后自主重新站立的能力,這些特性在環境惡劣的地下采礦場中是至關重要的。
準備開始工作的Spot機器狗
危險環境中的檢測工作
地下工程施工過程中,有些工作是需要在危險的環境中進行的,例如在鉆爆法施工過程中:每次完成爆破,都需要檢查所用炸藥是否全部被正確引爆。這項檢查工作要面對數種致命危險:
■ 未爆炸的爆炸物;
■ 殘余的有毒氣體;
■ 地勢不平加照明不足造成的跌倒風險。
這種情況下,使用機器人進行檢查就成為了很好的選擇。未爆炸的爆炸物和有毒氣體對機器人影響不大,但是地勢不平卻會對傳統的輪式機器人造成很大的影響。
而Spot機器狗越障能力強,并且具備在摔倒后自主重新站立的能力,這些特點使得它可以勝任這項任務。
工作中的Spot機器狗
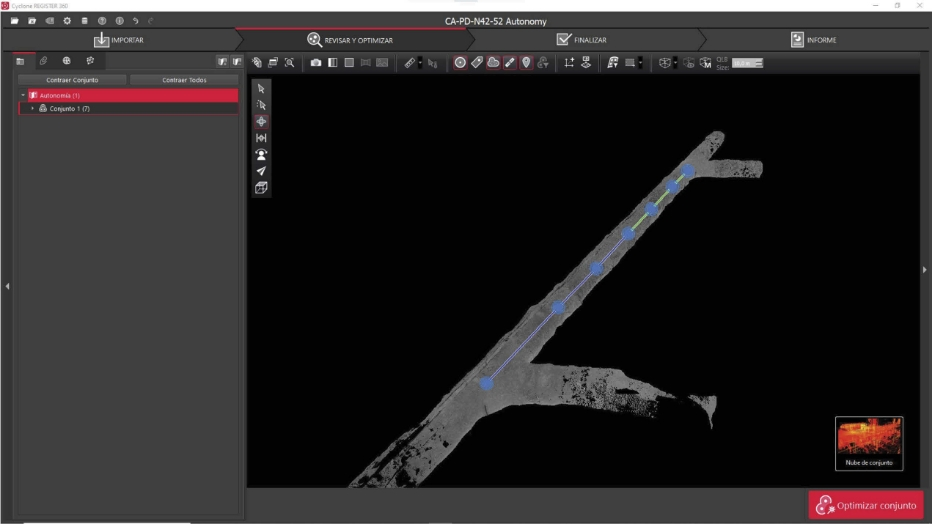
在智利的實際使用過程中,Spot機器狗在抵達目標區域后,會利用搭載的設備拍攝圖像并進行點云掃描,然后自主按照原路返回安全區,提供數據。
Spot機器狗爆炸物檢查流程
地下工程施工中有繁雜的測量和質檢檢查工作,這些工作可以使用機器人來高效完成。使用Spot機器人執行此類的優勢在于可以實現任務自主化,由于SPOT導航系統的可靠性,一旦將自主路線編入機器人,機器人就可以重復執行一項任務。
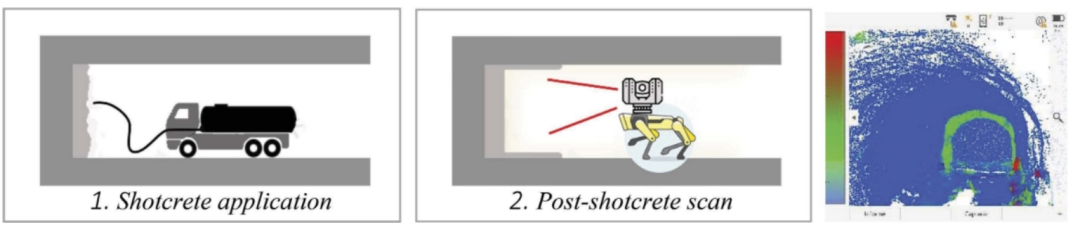
在智利的工程中,Spot機器狗承擔了噴射混凝土質量控制和測量等工作。機器狗身上攜帶著幾種不同的傳感器,一臺設備一次測量就可以收集到多種數據。
搭載多種傳感器
Spot機器狗的實際應用效果明顯,顯著提升了測量和質檢工作的效率,并且讓人類工作人員可以在更加安全和舒適的環境中完成任務。
Spot機器狗檢測噴射混凝土
使用過程中,施工方也發現了Spot機器狗的一些不足之處:
■ 通訊能力
遠程遙控與實時圖像傳輸都需要高速無線網絡,而地下工程施工現場實現信號全覆蓋比較困難,想要實現實時的數據交互就需要機器狗自己攜帶大功率的通訊設備。
■ 載重問題
Spot機器狗的載重能力還是比較有限的,這意味著它很難搭載大型設備,對其功能產生了一定的限制。
■ 移動速度問題
Spot機器狗的常規移動速度不能算快,雖然其最大奔跑速度可達1.6 米/秒;但背負設備并在困難地形中行動時,速度會大大放緩。
Spot機器狗依然有很多不足
增大體型是解決以上問題的簡單方法,更大的載重意味著機器人能夠攜帶更多的設備和通訊工具,并采用功率更高的動力系統;但更大的體型及重量也意味著靈活性與穩定性的降低,如何取得平衡將是未來技術發展的關鍵。
重型波士頓動力機器狗
機器人逐步取代人工是未來的必然趨勢,智利的丘基卡馬塔地下采礦場項目中Spot機器狗的應用也為地下工程領域更多的機器人在未來的應用打下了基礎。
相關推薦:軌道交通展、隧道展、城市軌道交通展覽會、城市軌道交通展覽會展位預定